Emad Razavi
Robotics Engineer (MSc) focused on perception and navigation research for mobile robots, with a background in electronics, embedded systems, and control theory, and hands-on robotics system development experience.

Robotics Engineer (MSc) focused on perception and navigation research for mobile robots, with a background in electronics, embedded systems, and control theory, and hands-on robotics system development experience.
A timeline of the moments that shaped my path into robotics, from my first school competitions to the research and startup work that drives me today.
Right now I am collaborating with a startup and working on Microsoft HoloLens 2 software, while also staying open to PhD opportunities where robotics, perception, and real-world systems meet. It feels like a new chapter shaped by everything that came before it: embedded systems, late nights in labs, research discipline, and the patience to keep growing.
I want the next step to keep that same balance between serious engineering and meaningful research.

On 18 December 2025, I graduated and closed one of the most meaningful chapters of my academic life. It was not only about the degree itself, but also about the people who helped me understand what it really means to grow into research with seriousness, discipline, and curiosity.
Angelo and Joao were more than supervisors to me. They taught me how I should become an academic researcher, and that lesson will stay with me much longer than the ceremony itself.

In 2024 I joined Dynamic Legged Systems as a guest researcher to complete my thesis. My work focused on modular semantic navigation on the Spot robot, bringing together mapping, perception, autonomy, and the kind of systems thinking that only becomes real when a robot is moving in the world.
That period became one of the best experiences of my life. It gave me the chance to work in a serious research environment, test ideas on a real platform, and understand more clearly the kind of robotics work I want to keep doing.

After working across companies and finishing my bachelor's degree in electrical engineering, I made one of the biggest decisions of my life. In 2023 I said goodbye to my family and friends and immigrated to Italy so I could follow my robotics path more seriously.
That move was not only academic. It was emotional, uncertain, and deeply personal. But it was also the moment I chose to bet on my dream with full commitment.

After the COVID period, the robotics labs were essentially destroyed, and that chapter of life changed abruptly. I joined Hooshmand Afzar Mayan, a startup that produced a robot toy for kids called ORBI, and that move gave me a different kind of robotics memory: lighter in product, but still full of creativity, teamwork, and practical engineering.
ORBI holds some of my warmest memories. It reminded me that robotics is not only about research labs and competitions. It can also be playful, human, and close to everyday life.

In 2019, when we were preparing for RoboCup Sydney, the lab stopped feeling like a workplace and became a second home. We spent days and nights there, solving failures, testing systems, adjusting electronics, and pushing ourselves to be ready in time for the competition.
That period taught me what technical commitment really looks like when a team is chasing something ambitious together. It was exhausting, intense, and unforgettable.
When I graduated from high school, I officially began my bachelor's degree in electrical engineering. At the same time, I joined MRL SSL as an embedded and electronic systems intern. What started as an internship quickly became a deeper role, and I grew into development work inside a serious robotics team.
That overlap between university and MRL was foundational for me. I was learning theory in one place and watching it become real, urgent, and useful in the other.
In 2013, while I was still a middle school student, I started my journey in robotics. I competed in several competitions and built robots such as line followers and rescue robots. At that age, I did not yet know the full shape of the future, but I already loved the mix of logic, hardware, experimentation, and challenge.
Looking back, that was the real starting point. The curiosity that began there never left, and nearly every later step in my career can be traced back to those early builds and competitions.

My academic background combines robotics engineering, electrical engineering, embedded systems, control theory, and optimization.
University of Genoa, 2023-2025.
Thesis: Semantic Object-Goal Navigation on a Quadruped Robot in Known Environments
View thesis details
Qazvin Azad University, 2018-2023.
Thesis: Optimal PID Controller Tuning for Time-Delayed Systems Using Ant Colony Optimization
View thesis details
Semantic Object-Goal Navigation on a Quadruped Robot in Known Environments
This thesis developed a two-stage object-goal navigation pipeline for Boston Dynamics Spot. The system first records a clean 2D map and a compact set of confirmed object instances, then reuses that saved world model to navigate to named objects safely and repeatably.
A short teleoperation run builds the occupancy map and records only stable RGB D object observations into a semantic database.
Spot localizes on the saved map, selects a requested object, and sends Nav2 a safe standoff goal near that object. Targets can be selected from a CLI or by voice.
Work carried out at Dynamic Legged Systems, Istituto Italiano di Tecnologia.
The stack is intentionally lightweight: Spot uses a 2D LiDAR for mapping/localization, a RealSense T265 for visual-inertial odometry, and a RealSense D435 for RGB D detections. SLAM Toolbox builds the pre-run map; during navigation, AMCL localizes on the fixed map and Nav2 sends goals through the ROS 2 bridge.
During the pre run, D435 RGB detections are projected into 3D using depth and transformed into the map frame. The semantic layer keeps temporary observations separate from confirmed objects, which reduces noisy entries in the final database.
The implemented system includes a confirmed-only semantic layer, an object-to-goal interface for Nav2, onboard Spot deployment, RViz/rosbag tooling, and repeated-run supervision. Evaluation covered three real indoor environments: a church, the DLS lab, and a large IIT test room.
The same pipeline produced usable 2D maps across different layouts and kept the semantic database compact by focusing on a small set of object classes. The main observed limitations were depth alignment bias in object placement and localization inconsistency causing early goal acceptance in edge cases. Both failure modes were visible in logs and RViz, making the system inspectable and technically actionable.
Optimal PID Controller Tuning for Time-Delayed Systems Using Ant Colony Optimization
This project was my Bachelor thesis during my studies at Qazvin Azad University under the supervision of Prof. Hamid Qadiri.
This project investigates PID tuning with Ant Colony Optimization for a second-order control system, while explicitly modeling a delayed baseline to study how time delay affects the transient response. The goal is to minimize the Integral of Time-weighted Absolute Error (ITAE) and obtain a faster, cleaner response with reduced oscillation and smaller tracking error.
We implemented the project in MATLAB and combined classical transfer-function modeling, heuristic optimization, and result visualization. We first build the delayed reference model, then search for PID gains that improve closed-loop performance through repeated simulation and pheromone-based updates.
We define the plant as G = tf([1], [1 2 3]), which corresponds to a
second-order transfer function. A pure delay is then introduced through exp(-1 * s). Since a
pure delay is not directly convenient for rational transfer-function analysis, we use a
first-order Pade approximation to construct the delayed model used for the baseline step response.
Plant transfer function
G(s) = 1 / (s2 + 2s + 3)
Time delay term
e-s
First-order Pade approximation
e-s ≈ (1 - s/2) / (1 + s/2)
Delayed model used for baseline analysis
Gt(s) = G(s) . Pade[e-s]
[1 2 3].exp(-s) with pade(delay, 1) to obtain a rational delayed model.Gf = feedback(Gt, 1) and plotted before controller tuning.The controller follows the standard PID structure with proportional, integral, and derivative gains. The performance target is ITAE, which weights the tracking error by time and therefore penalizes not only large deviations but also errors that persist for too long.
PID controller law
u(t) = Kpe(t) + Ki∫e(t)dt + Kdde(t)/dt
ITAE objective
ITAE = ∫0T t|e(t)|dt
Closed-loop model evaluated in the optimization loop
Gcf(s) = feedback(C(s)G(s), 1)
One implementation detail is worth stating clearly: in our current implementation, the delayed model is
used for the initial baseline plot, while the ACO loop evaluates PID candidates on the nominal plant
through feedback(Gc * G, 1). This page reflects that implementation exactly.
We use 10 ants, 10 iterations, a pheromone decay factor of 0.6, a scaling factor of 2, and three tuning variables for Kp, Ki, and Kd. Candidate gains are sampled through pheromone-weighted roulette-wheel selection.
For each ant, MATLAB builds a controller with pid(kp, ki, kd), simulates the step response, computes an ITAE-style cost, and reinforces the pheromone trail of the best candidate in that iteration while the others decay.
Our MATLAB workflow is organized around four stages: system definition, ACO initialization, iterative search, and result visualization. We define the nominal and delayed models, allocate the pheromone tables and candidate arrays, evaluate sampled PID gains in closed loop, and store the best cost value across iterations.
G, builds the delayed model with pade(delay, 1), and plots the unity-feedback delayed response.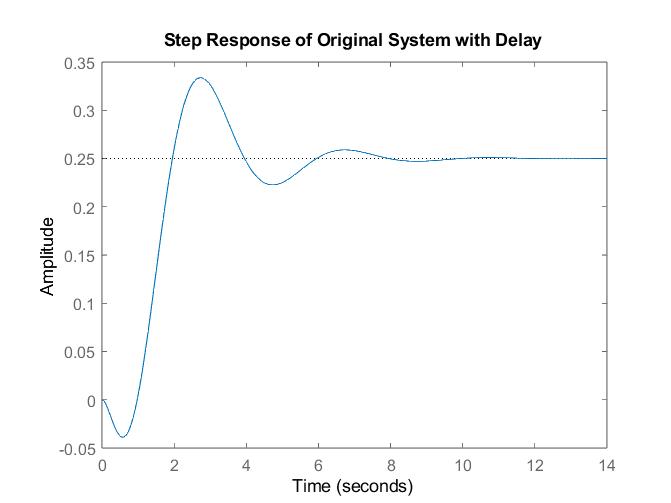
Figure 1. Step response of the original delayed system. The uncompensated response shows overshoot and oscillatory behavior, highlighting the performance degradation introduced by delay.
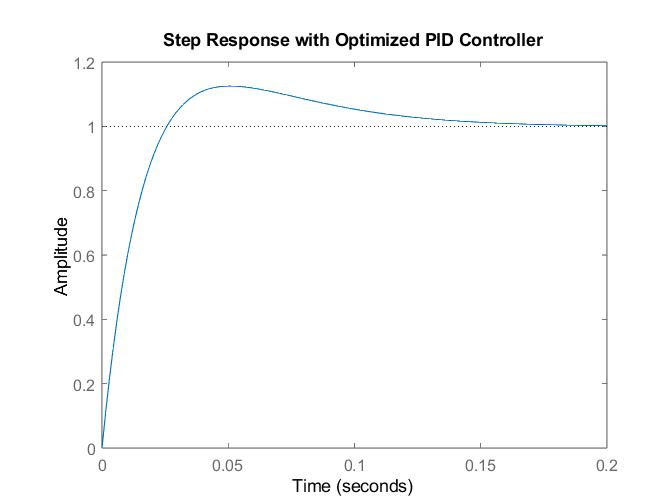
Figure 2. Step response after tuning the PID gains with ACO. The optimized controller improves settling behavior and produces a noticeably cleaner transient response.
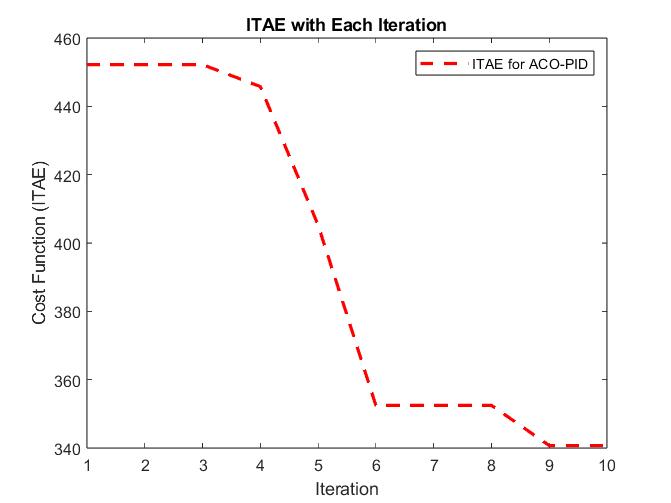
Figure 3. ITAE across optimization iterations. The downward trend indicates convergence toward more effective PID gains.
The project is implemented in MATLAB with the Control System Toolbox. Running the main file builds the delayed baseline model, executes the ACO-based PID search, reports the best gains and minimum ITAE in the command window, and generates the three figures used in the thesis.
PID_ACO.m.kp, ki, kd, and Min_ITAE.The experiment can also be repeated with different ACO settings. The most direct parameters to adjust are the number of ants, pheromone decay factor, scaling factor, number of iterations, and the lower bound, upper bound, and step size of the PID gain search space.
This thesis shows that Ant Colony Optimization can be used effectively to tune a PID controller for a second-order control problem with a delayed reference model. By minimizing ITAE, the optimized controller achieves a cleaner transient response and better settling behavior than the uncontrolled baseline.
It also demonstrates the value of combining classical control tools with heuristic optimization in a compact, reproducible MATLAB workflow. The project was a solid first experience in algorithmic controller tuning and technical evaluation during my undergraduate studies.
A concise overview of my engineering and research experience across robotics, embedded systems, autonomy, and product development.
Research & Robotics Experience
Dynamic Legged Systems, Istituto Italiano di Tecnologia (IIT)
Nov 2024 - Dec 2025 Genova, Italy
Worked on autonomous navigation and semantic object-goal navigation for Boston Dynamics Spot.
Hushmand Afzar Mayan-Orbi Startup
Sep 2020 - Sep 2021 Qazvin, Iran
Developed embedded control, sensing, interaction, and power behavior for a spherical smart-toy robot.
RoboCup Small Size League, Mechatronics Research Laboratory (MRL)
Aug 2018 - Sep 2020 Qazvin, Iran
Built and maintained embedded hardware and firmware for RoboCup holonomic robots.
Additional Engineering Experience
Widecons S.R.L.
Jan 2026 - Present Genova, Italy
Develop industrial client and edge-gateway integrations across field systems, cloud services, and PLC layers.
DOPE Drone Project
Feb 2024 - Aug 2024 Genova, Italy
Designed drone flight-controller and wireless communication electronics with firmware integration.
Radmansys Co.
Oct 2021 - Oct 2022 Tehran, Iran
Designed, tested, and optimized industrial electronic systems, PCBs, hardware, and firmware.
Research Laboratory · Genova, Italy
The Dynamic Legged Systems lab at IIT develops legged robots for robust operation in complex environments, combining robot design, locomotion and control, perception, autonomy, and software development, with a strong emphasis on quadruped platforms.
I joined Dynamic Legged Systems first as a Research Intern in Autonomous Navigation and later continued as a Master's Thesis Researcher. Across that period, I contributed to mobile robot navigation research and developed the semantic object-goal navigation system behind my master's thesis on Boston Dynamics Spot.
This work forms the main implementation behind Semantic Object-Goal Navigation on a Quadruped Robot in Known Environments.
Startup · Qazvin, Iran
SYNTECH Technology and Innovation Center at Qazvin Azad University supports projects at the intersection of robotics, mechanics, AI, software development, and design. ORBI was a startup developed within that environment, focused on a small educational robot toy that helped children engage with math and physics concepts.
ORBI was a spherical smart-toy robot where embedded control, sensing, power behavior, hardware debugging, and product-level interaction were tightly connected.
RoboCup Small Size League · Qazvin, Iran
MRL, the Mechatronics Research Laboratory at Qazvin Islamic Azad University, is a robotics and mechatronics research center focused on developing robotic systems, training engineering students, and competing in national and international robotics competitions such as RoboCup.
MRL was my first serious robotics environment: a competition-focused lab where hardware, firmware, control, debugging, and teamwork came together inside real RoboCup holonomic robots.
Industrial & Edge Systems · Genova, Italy
Widecons is an innovative consulting startup in Genova that helps SMEs improve through digital, green, and lean solutions.
At Widecons, I work across mixed-reality clients, edge gateway integration, and industrial OT interfaces, connecting field-facing workflows with deployment and validation needs.
Drone Project · Genova, Italy
DOPE Hubs is a student-led engineering and innovation team focused mainly on aircraft and aerospace-related projects. It gives students hands-on experience in designing, developing, and testing technical systems across aeronautics, robotics, electronics, and applied engineering.
At DOPE, I worked on embedded and electronics development for drone systems, where hardware, firmware, and wireless communication had to fit together cleanly in practical prototypes.
Industrial Electronics · Tehran, Iran
Radman Hitech Systems is an engineering company specializing in the design, development, and consulting of electronic and electrical systems. The company provides technical solutions in PCB design, embedded hardware, circuit implementation, and customized electronics-based products for industrial and commercial applications.
At Radmansys, I worked on industrial electronic systems, connecting schematic design, PCB development, hardware validation, and firmware optimization for practical products.
My master's thesis presents a practical object-goal navigation pipeline for Boston Dynamics Spot in real indoor environments. A pre-run records a 2D map and semantic object database; during operation, the robot localizes on the saved map, selects a recorded object target, and navigates using a layered Nav2 costmap with onboard sensing and computation.
This paper describes an online semantic object mapping system for quadruped robots. The mapper combines range geometry with RGB D detections, merges repeated observations into persistent object instances, and produces a compact object layer that can be queried by class, pose, and confidence.
This team description paper presents the MRL Small Size League robot hardware and software design, including rule-driven software updates, reliability improvements, accuracy enhancements, and changes to the electronic structure that enabled more complex robot behavior.
I am open to PhD, research, and robotics engineering opportunities involving autonomy, perception, navigation, SLAM, and real-world robot deployment.